
Projects
The Cherry Gateways
The Cherry Gateways are a trio of IoT (Internet of Things) gateways developed by Red Tape Labs, the startup I co-founded. Purpose-built for industrial edge environments, these ruggedized outdoor servers deliver advanced processing capabilities and seamless cloud integration, enabling businesses to harness cutting-edge technology in the most demanding conditions.
Currently, Cherry Gateways are deployed at the Prism Cement Plant in Satna, India, managing asset allocation, theft prevention, and other logistics solutions.

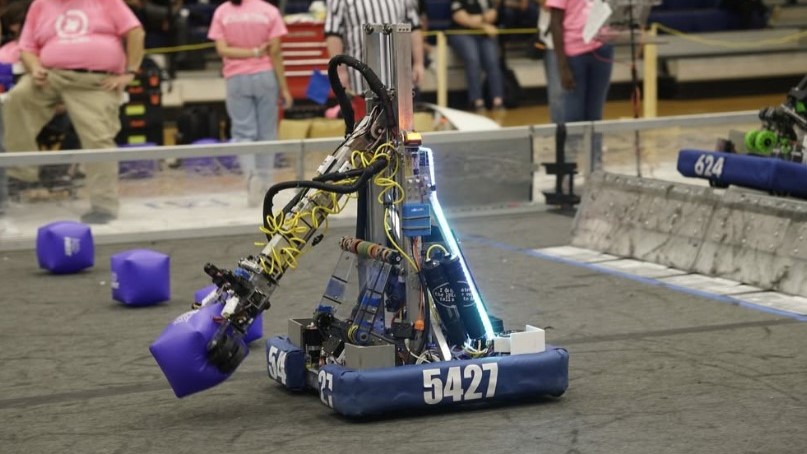
“Vesper” 2024 FRC Robot
“Vesper” is a competition robot I spearheaded for design, manufacturing, and programming during the 2024 FIRST Robotics Competition season, Crescendo.
Built in just 8–10 weeks, it leveraged Autodesk Inventor for CAD/CAM, Autodesk Vault for PDM, and featured parts fabricated through CNC machining, manual milling, and 3D printing. Controls programming was primarily in Java, with Flutter/Dart for dashboard UI systems.
Vesper secured our team’s second-ever qualification for the World Championships, and placed us in the top 3% of teams globally.
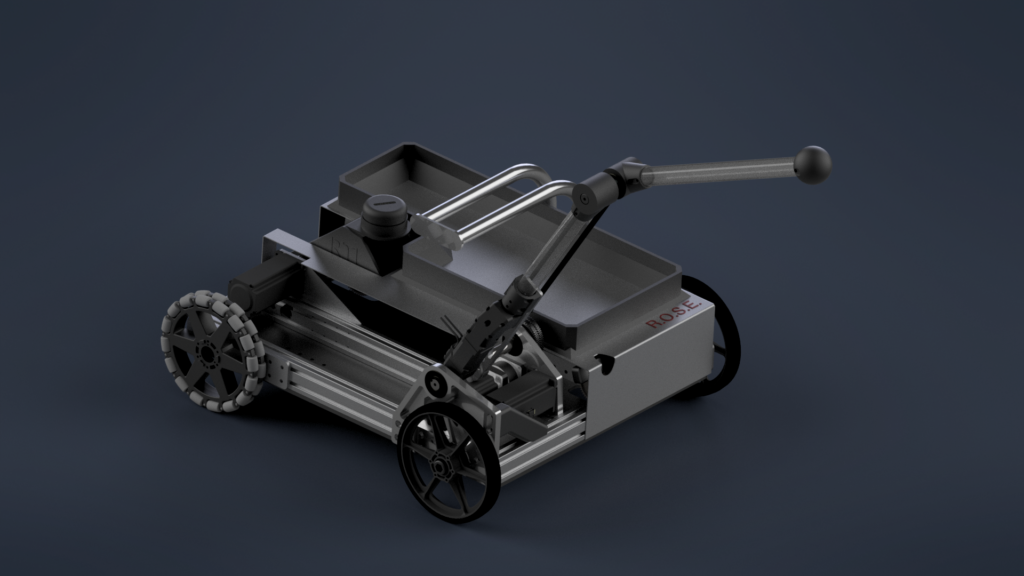
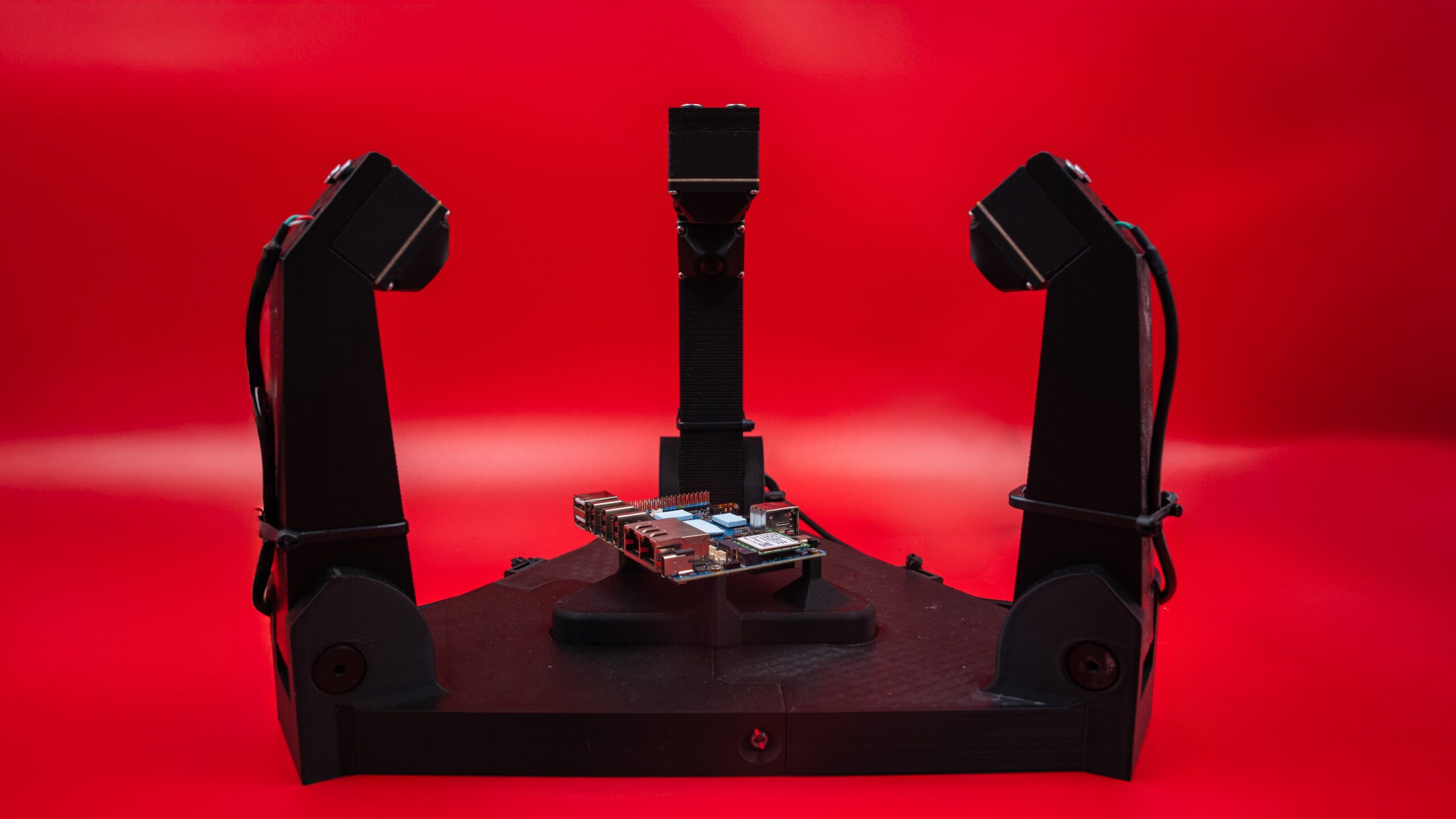
The R.O.S.E. Prototype
The R.O.S.E. (Remote Operations and Servicing Entity) robot is an advanced industrial solution designed for deployment in harsh and challenging environments.
Ruggedized to withstand extreme outdoor conditions, it features a battery life exceeding four hours, enabling extended operational capabilities. In addition to facilitating remote scouting and communication, R.O.S.E. is equipped to transport small packages and tools over large distances, enhancing productivity and reducing downtime.
With capabilities such as drone deployment, remote operation, and versatile goods transportation, R.O.S.E. is a transformative tool for modern industrial environments. Currently in prototyping.
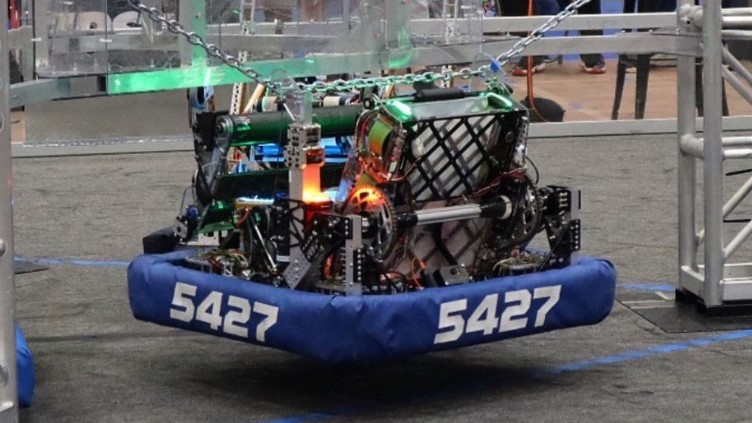
“Ace” 2023 FRC Robot
Similar to “Vesper” in terms of design, manufacturing, programming, and timeframe, except designed for the 2023 FIRST Robotics Competition, Charged Up, with entirely different objectives, game goals, and field setup.
“Ace“ took our robotics team to the FRC World Championships for the first time in the team’s history.
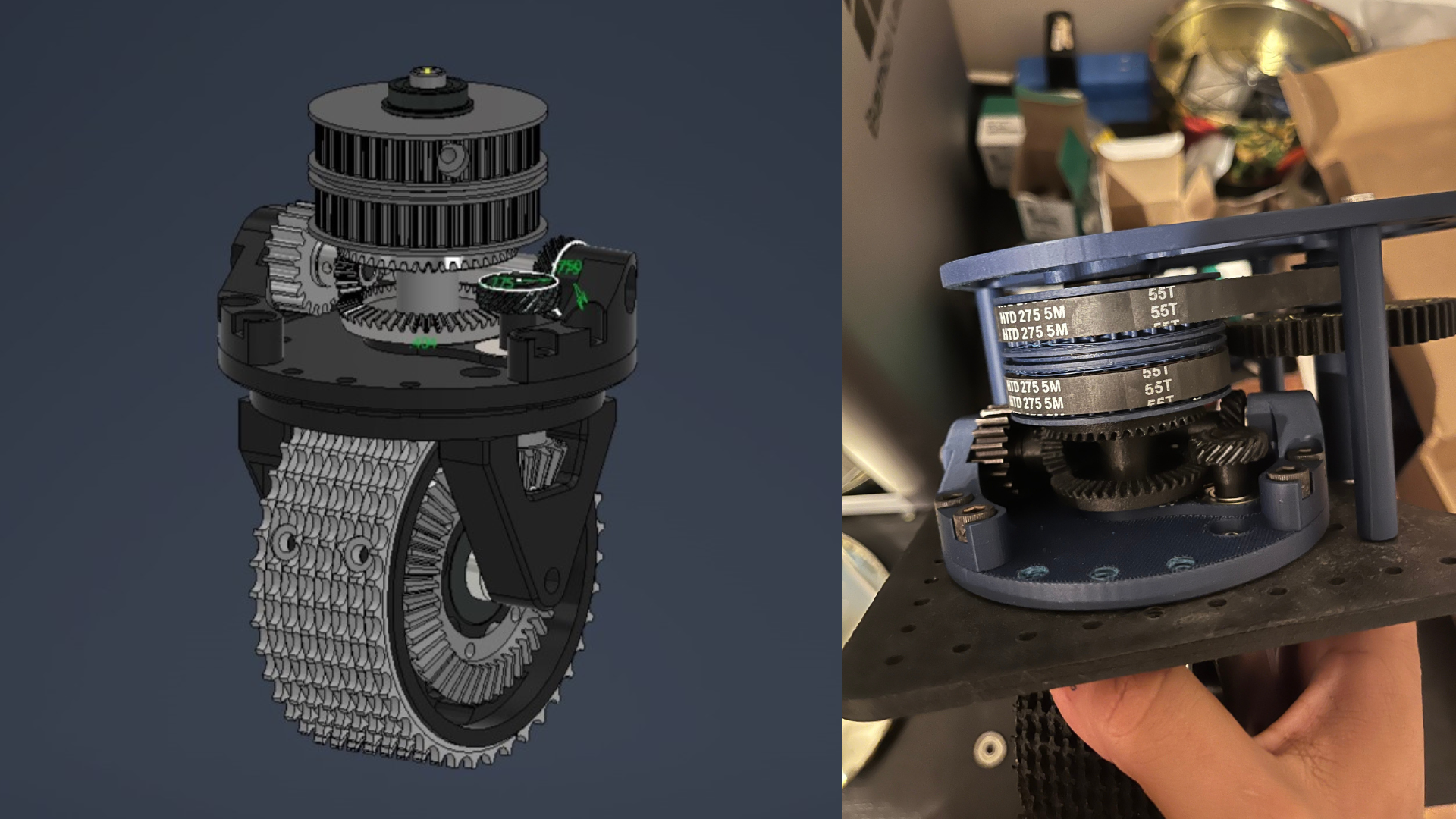
The Talon Differential
The Talon Differential was an experimental drive system I designed and built for FRC robots in 2023 to push the boundaries of drivetrain performance. FRC’s motor limit of eight often forced teams to dedicate four motors solely to angling wheels for holonomic motion, leaving less power for propulsion.
My design overcame this by using a differential core, inspired by CoreXY systems, where both motors contributed to both angling and propulsion, maximizing drivetrain acceleration.
Unfortunately, this style of drive system was made illegal at the start of the following season, so The Talon Differential never reached the arena.
The Ruby Enclosure
The Ruby Enclosure was designed with the intent to inspect inbound, imported devices, ensuring both security, and operational success. Utilizing AI-driven video streaming, it investigates devices with precision, while four HD cameras simultaneously stream security data for comprehensive monitoring. The software is deployable across all workstations and fully customizable, making it easy to update for new devices, ensuring adaptability for evolving needs.
It is currently 3D printed, and in development/testing.
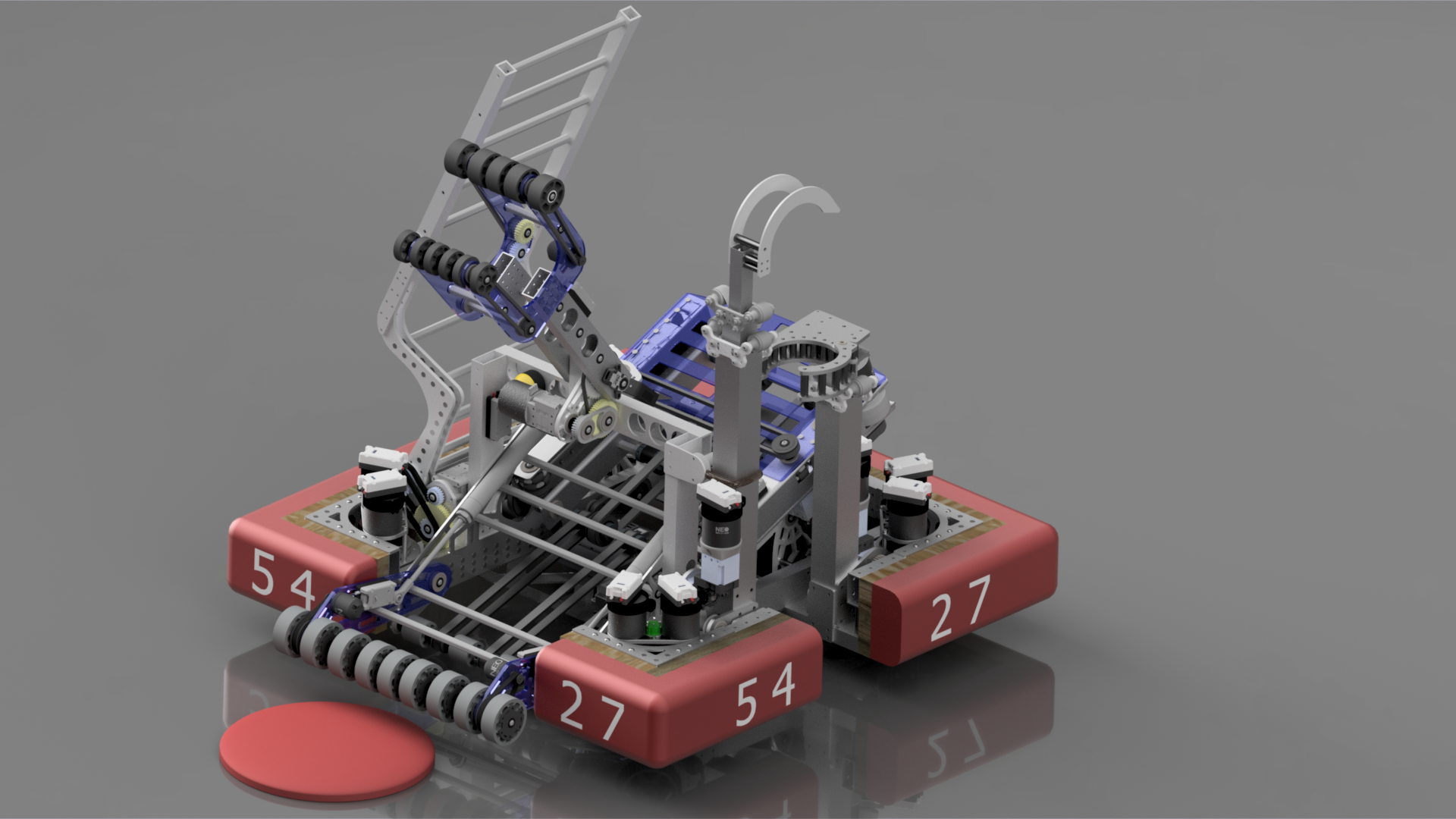
2023 F4 CADathon Robot
The F4 CADathon is an international robot design marathon that kicks off before the official FIRST Robotics Competition season. Over two weeks, 45 teams of three design a fully detailed robot in CAD software and draft an in-depth whitepaper for a hypothetical game.
Our submission, showcased to the right, was designed in Autodesk Inventor and earned us 4th place globally in the 2023 CADathon.
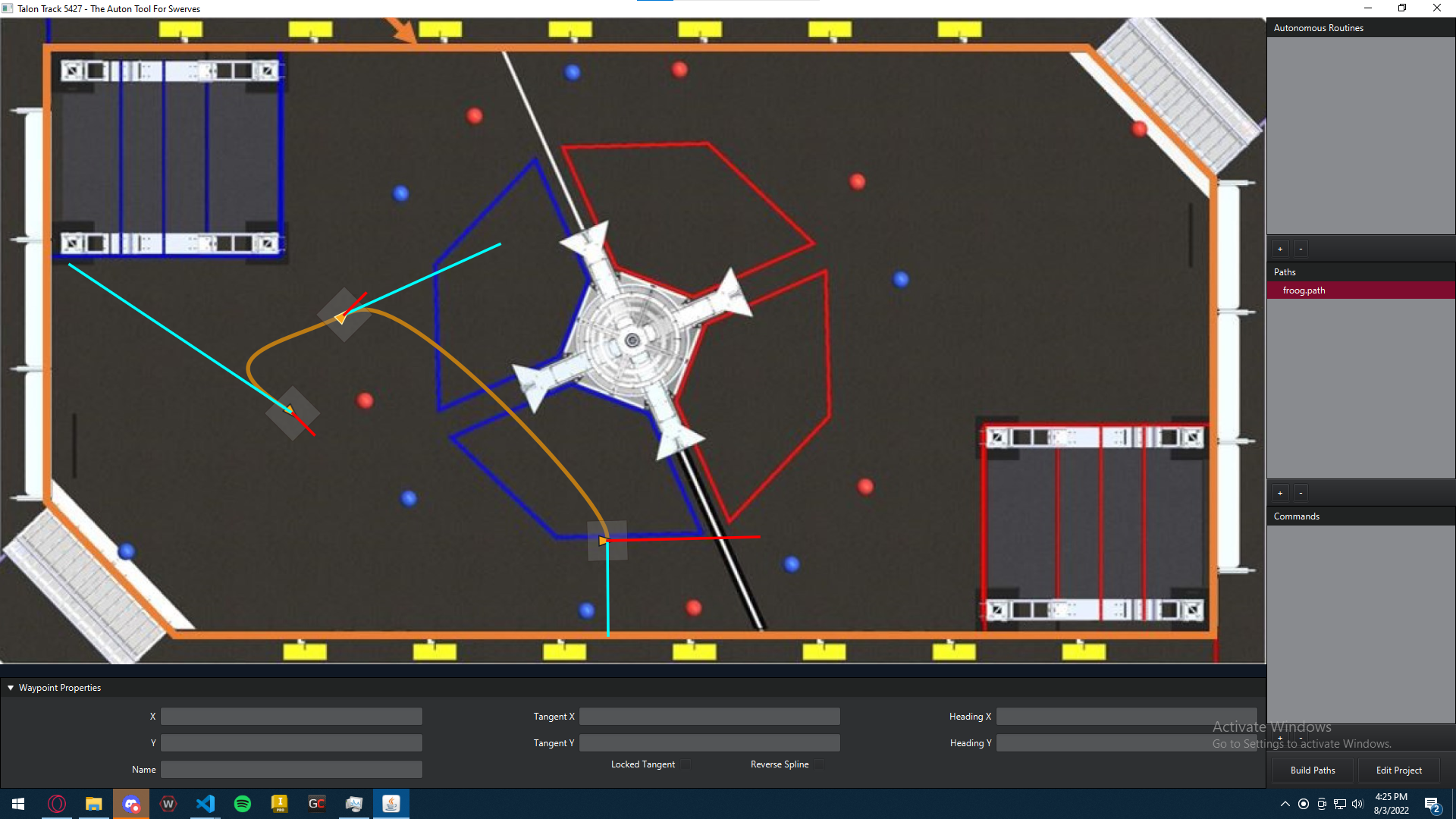
Talon Track
Talon Track is a trajectory planning software I developed in 2022 to revolutionize autonomous movement for holonomic FRC robots. At the time, existing systems relied on “tank-style” movement, lacking support for strafing and independent heading trajectories. I tackled this limitation by reprogramming a clone of the primary trajectory planning software, enabling seamless strafing and precise heading control. Both the back-end and UI were done with Java.
We deployed Talon Track during the 2023 season, earning the District Autonomous Award.
Custom Mining Rig / PC
I built a custom cryptocurrency mining rig in 2021, utilizing a powerful GPU (Nvidia RTX 3060 Ti) to process Ethereum transactions. It also doubles as my primary CAD/Design workstation.
It also features active cooling management, in the form of both aerial and liquid cooling.

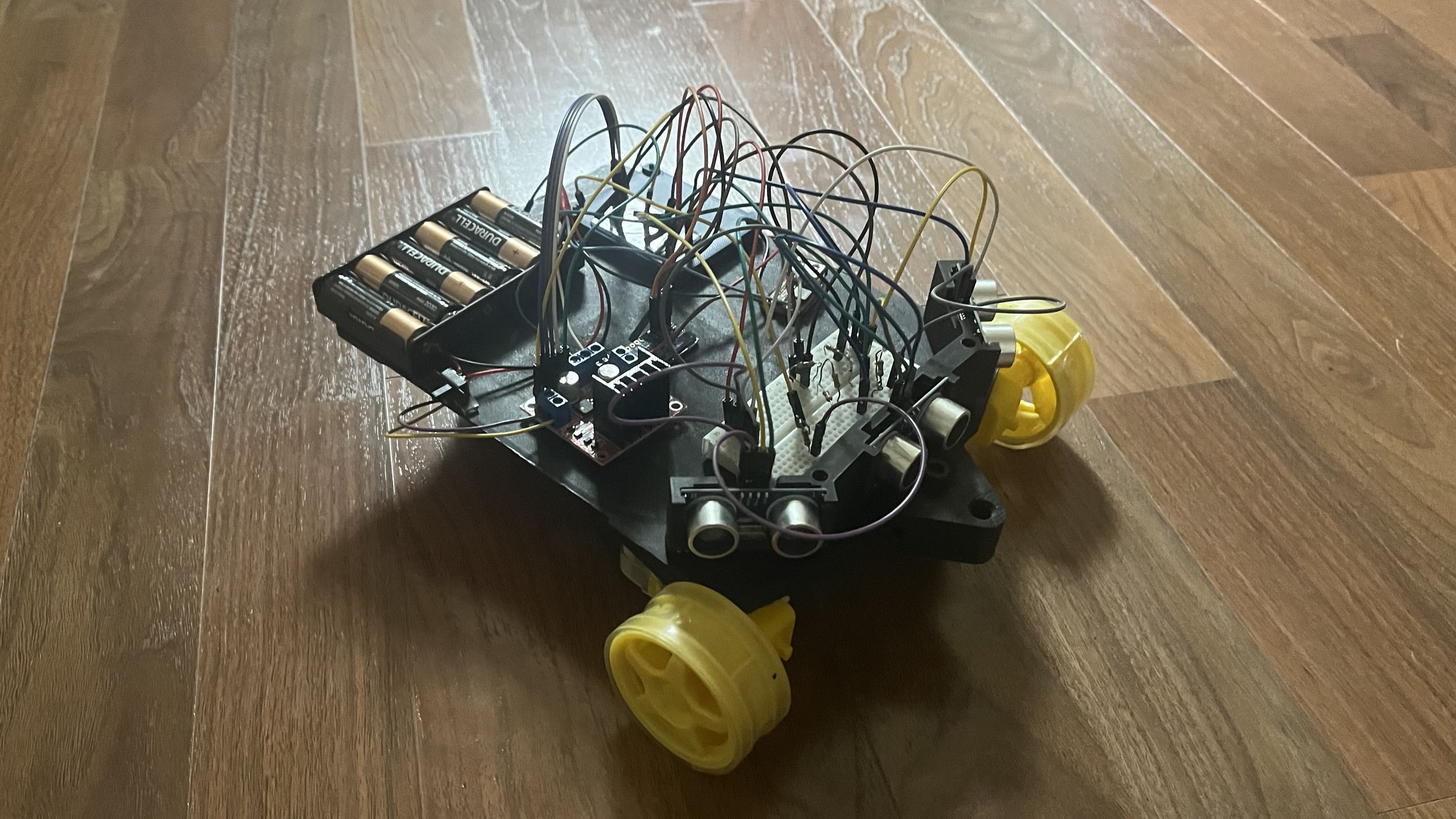
SciOly Maze Solver Robot
HoloLens Video Player App
